-
Matter Design is an interdisciplinary design practice founded in 2008 by Brandon Clifford and Wes McGee, centred on the continual interrogation of the reciprocity between drawing and making. Their shared interests in design coupled with proficiency in the means and methods of production have led Clifford and McGee to collaborate on a range of experimental projects which break conventional disciplinary notions of scale. Matter Design is dedicated to re-engaging the discipline of architecture with the nuances of matter in the digital era.
Matter Design is also a research practice that has been actively engaged in industrial robotics from its inception; robotic tools are an ideal platform for interrogating the translation from design to production.
Matter Design’s work has been exhibited worldwide and received numerous awards. In addition to the continual collaboration of the practice, the principals are currently based at the University of Michigan (Wes McGee) and the Massachusetts Institute of Technology (Brandon Clifford).
matterdesignstudio.com
-

Microtherme, Brandon Clifford + Wes McGee, 2015. (Photo © Matter Design)Industrial robots are generic machines, designed for high reliability as well as interoperability with other industrial equipment. But they are inherently custom tools also, requiring an integrative approach to software development, tooling, and material process. This capacity for customisation produced an ideal platform for a generation of designers and makers for which typical digital fabrication tools, like CNC routers and laser cutters, were not enough. Contemporary robotic fabrication in architecture follows two trajectories; the use of robotic tools in novel applications in prefabrication, and their use as on-site construction tools. Within both of these trajectories, a wide range of novel material processes are being explored at the scale of architecture. Real-time sensing and intelligent processes enable robotic tools to respond to both material and the environment, which is critical for the application of robotic tools on “unstructured” construction sites. The focus of our selection here is on organisations and projects that are near to or beginning commercial application.
-
Asbjørn Søndergaard, Jelle Feringa and Anders Bundsgaard
—
Odico is a technology startup founded in 2012 and grew out of academic research at the Hyperbody TU Delft research group. It is based in Odense, Denmark and focuses on robotic fabrication at the scale of architecture. Complex formwork production for concrete casting typically requires extensive CNC milling. But Odico translated the concept of the ruled surface into a fabrication technique (robotic hotwire cutting) which means the time for machining can be reduced up to one hundred fold. Extending this further by utilising a diamond wire to cut stone produces entirely new forms in a fraction of the time needed by traditional techniques.
odico.dk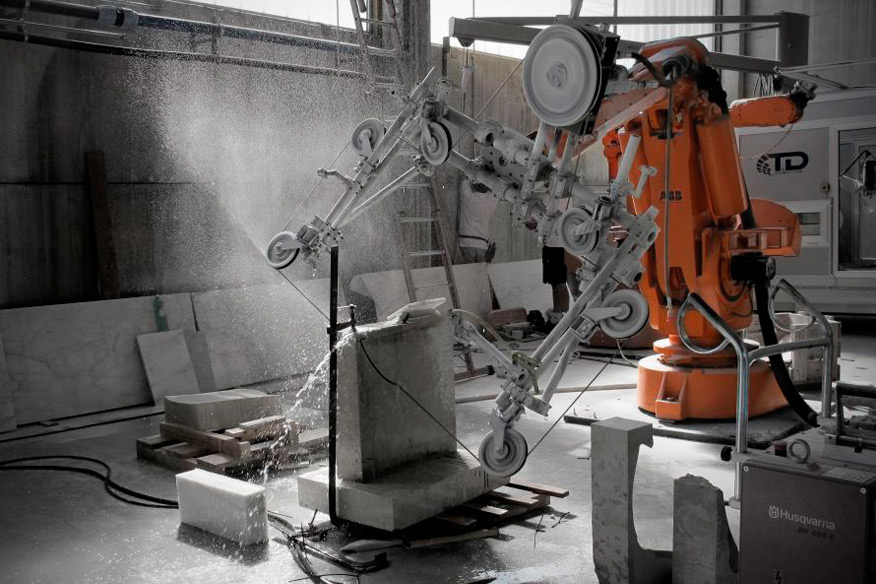
ABB 6400 model with a custom end-effector. (Photo: Jelle Feringa, 2013) -
 Höweler + Yoon Architecture and Quarra Stone
Höweler + Yoon Architecture and Quarra Stone—
Quarra Stone has been fabricating stone for over 20 years and introduced robotic technology to their workflow a decade ago. More recently they have been taking on the production of complex geometries, notably the Sean Collier Memorial on the MIT campus by Howeller + Yoon Architecture. One of the keys to the realisation of this project was Quarra’s ability to work with the engineering and design teams. The architects, along with their consultants, developed a computational design tool to permit the nesting of massive components into a catalogue of quarried blocks, allowing real time design feedback for seam placement and fabrication constraints. Quarra’s extensive machining experience allowed them to achieve sub-millimetre accuracy on components weighing over five tons.
hyarchitecture.com
The Sean Collier Memorial, 2014. (Photo © Iwan Baan) -
 ICD and ITKE, University of Stuttgart
ICD and ITKE, University of Stuttgart—
The Institute for Computational Design and the Institute of Building Structures and Structural Design at the University of Stuttgart are world renowned for their cutting edge research into architectural applications of robotic fabrication and biological construction. Their 2014-15 pavilion is based on the web construction process of water spiders. One particularly interesting development in this project is the use of real-time adaptive control of the robot, allowing the system to conform to the pneumatic formwork, which is constantly reacting to the build-up of the composite material on the surface. Through a highly integrated computational design and fabrication process the designers are able maximise material efficiency. The final shell covers an area of 40 square metres with only 260 kilogrammes of material.
icd.uni-stuttgart.de
Pneumatic formwork with robotic fibre reinforcement (Photo: © ICD/ITKE University of Stuttgart) -
 Matthias Kohler & Fabio Gramazio and ETH Zurich
Matthias Kohler & Fabio Gramazio and ETH Zurich—
The work of Matthias Kohler and Fabio Gramazio has arguably inspired a generation of architectural researchers to apply industrial robotics to building-scale fabrication. While they are perhaps best known for their work on parametrically designed brick facades, they have also completed an extensive range of research and design projects at the Chair of Digital Fabrication at ETH Zurich. One of their most far-reaching applications focuses on a multidisciplinary approach to in situ fabrication involving architects, robotic engineers and machine integrators. In May 2015 they presented an autonomous construction robot prototype at NCCR Digital Fabrication. Whilst it is still likely to be a few years before such fabrication equipment appears directly on the construction site, the application of real-time sensing and vision to fabrication problems has immediate benefits in a wide range of prefabrication applications.

gramaziokohler.arch.ethz.ch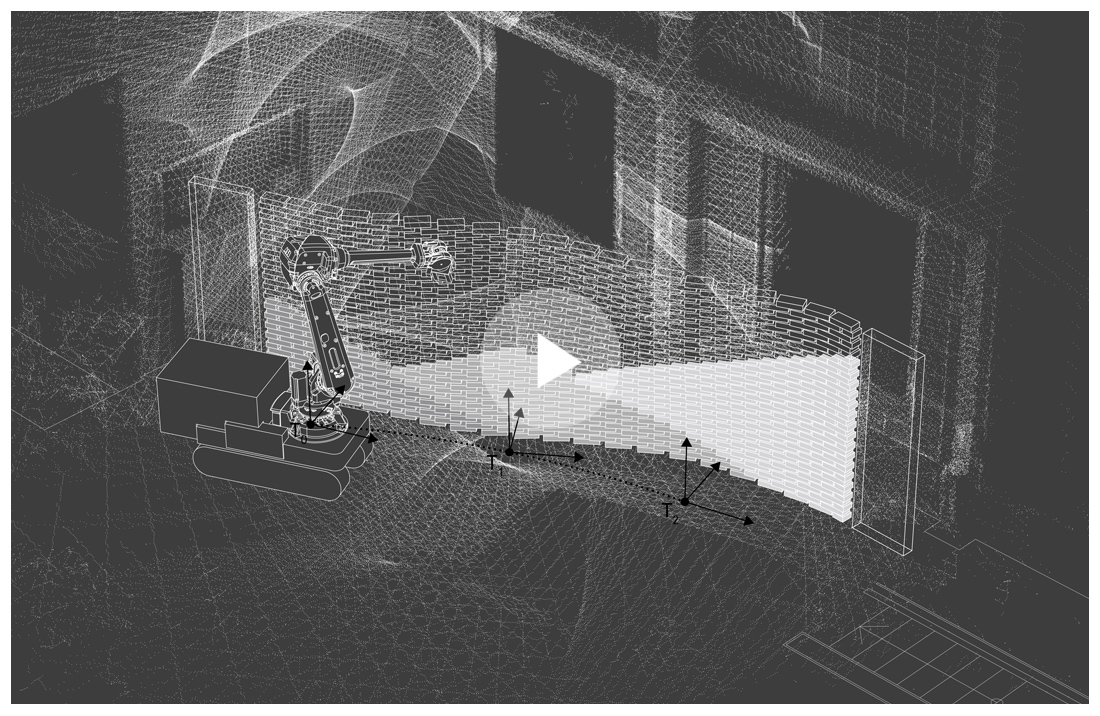
Building Strategies for on-site Robotic Construction, Gramazio Kohler Research and Agile & Dexterous Robotics Lab, NCCR Digital Fabrication, ETH Zurich, 2015. (Film: ETH Zurich)
-
Search
-
FIND PRODUCTS
PRODUCT GROUP
- Building Materials
- Building Panels
- Building technology
- Façade
- Fittings
- Heating, Cooling, Ventilation
- Interior
- Roof
- Sanitary facilities
MANUFACTURER
- 3A Composites
- Alape
- Armstrong
- Caparol
- Eternit
- FSB
- Gira
- Hagemeister
- JUNG
- Kaldewei
- Lamberts
- Leicht
- Solarlux
- Steininger Designers
- Stiebel Eltron
- Velux
- Warema
- Wilkhahn
FEATURED



-
Follow Us
Tumblr
New and existing Tumblr users can connect with uncube and share our visual diary.
»Where there is nothing, everything is possible. Where there is architecture, nothing (else) is possible.«
Rem Koolhaas
Keyboard Shortcuts
- Skip Articles
- Turn Pages
- Contents